2025/09
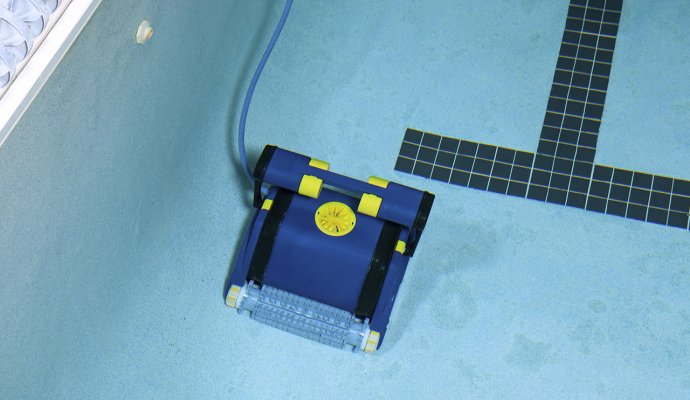
魯渝能源泳池清潔機器人無線充電器以其自由清潔、高效充電、安全可靠、智能便捷、兼容性強和環保節能等眾多優勢,成為泳池清潔新時代的卓越之選。它不僅為用戶帶來了更加便捷、高效、安全的泳池清潔體驗,還推動了泳池清潔行業的智能化、環保化發展。
2025/09
魯渝能源履帶式光伏清掃機器人無線充電器是光伏清潔領域的一項重要創新。它解決了傳統充電方式的諸多問題,為光伏電站的高效運行提供了有力保障。
2025/08
干掛式光伏清掃機器人的無線充電方案是光伏清潔領域的一次重大創新。它不僅解決了傳統充電方式的局限性,提高了干掛式光伏清掃機器人的工作效率和可靠性,還為光伏電站的智能化維護提供了有力支持。
2025/08
機房軌道智能巡檢機器人無線充電方案是一種高效、可靠、安全的充電解決方案。它為機房的智能化運維提供了有力支持,將推動機房運維水平邁向一個新的臺階。隨著無線充電技術的不斷發展和完善,相信它將在更多的領域得到廣泛應用。
2025/08
魯渝能源畜牧業養殖機器人無線充電方案為智慧養殖提供了強大的技術支持,將推動畜牧業向智能化、現代化方向發展。我們相信,在無線充電技術的助力下,畜牧業養殖將迎來更加美好的未來。
2025/08
智能四向穿梭機器人無線充電方案是物流倉儲行業的一次重大創新。它不僅解決了傳統有線充電方式的諸多弊端,提高了智能四向穿梭機器人的使用效率和壽命,還為倉儲作業帶來了更加高效、安全、便捷的充電體驗。
2025/08
在未來的倉儲物流領域,托盤四向穿梭車的應用將會越來越廣泛,而充電方式也將不斷創新和完善。我們相信,隨著科技的不斷進步,將會有更多更加高效、便捷、智能的充電方式出現,為托盤四向穿梭車的發展提供強有力的支持。
2025/08
在工業4.0和智能制造的大趨勢下,工業設備的智能化和自動化程度越來越高,無線充電作為其中的關鍵技術之一,其專業性將直接影響到整個工業生產的效率和質量。
2025/08
在未來的發展道路上,魯渝能源將繼續秉承創新、品質、合作的品牌理念,不斷提升自身的技術實力和服務水平。將與更多的工業企業攜手共進,為工業移動設備提供更加高效、可靠的無線充電解決方案,共同推動工業領域的智能化、自動化發展。
銷售電話 186-7890-1310
投資郵箱 lidan@www.928928.net
微信咨詢
? 版權所有 青島魯渝能源科技有限公司 魯ICP備15033784號-1 技術支持:華夏商務網